前言
前段时间买了个香橙派Zero3(为啥不买树莓派?因为没钱!!),本来想拿来继续专研软路由的,毕竟openwrt还是有一些可玩性的。但是在给板子装系统的时候突然想起好久以前就有的想法,那就是给手动啤纸机装一个机械臂,用来上下纸。以前是想着使用stm32来做的,但是现在既然买了这些集成度比较高的开发板,那刚好就用来实现自己的想法啦!(其实就是因为stm32太难啃了/(ㄒoㄒ)/~~)
准备工作
目前我们先不准备硬件,先以软件学习为主
- Ubuntu桌面版(开发平台)
- ROS2环境
- vscode软件(Ubuntu下的)
- Python3
安装ROS2
首先打开电脑(Ubuntu),因为ROS2对Linux的支持较好,基本上我们的ros程序也都是在linux上执行的,包括后面我们也会将树莓派或其他linux板子作为我们机器人的主控板。所以我们需要装一个Linux的系统,我这里使用的是Ubuntu22.04版本,具体怎么装系统这里我就不多说明了,简单点的我们可以直接下载个Ubuntu的镜像文件,然后直接在自己的windows电脑使用VMware安装虚拟机。
准备好一台Linux的电脑后我们就可以安装Ros2了,我选择的是humble版本,具体安装流程可以进入官网查看官网安装,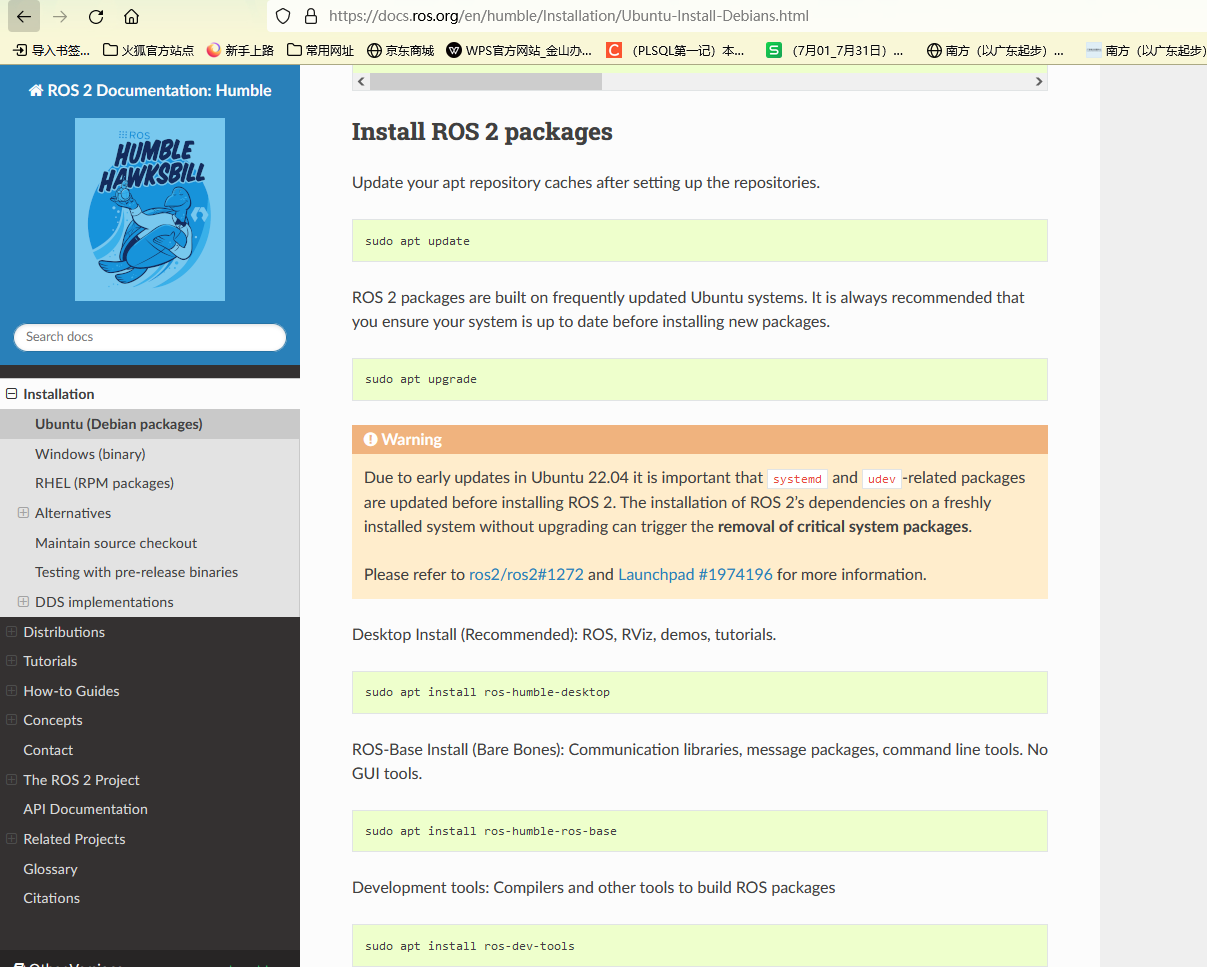
安装命令:sudo apt install ros-humble-desktop
当然,官网上的页面也说了,在真正安装ros之前还要做一些配置,比如设置编码,设置apt的仓库(换源),配置密钥等等。包括后面安装之后的环境配置也是比较繁琐的,对于时间充裕,想一步步思考的可以按官方的步骤安装。
这里我就分享ros2圈里有名的大牛《鱼香ROS》提供的一键安装脚本吧
wget http://fishros.com/install -O fishros && . fishros
执行之后,按脚本提示输入对应的数字进行安装就可以了
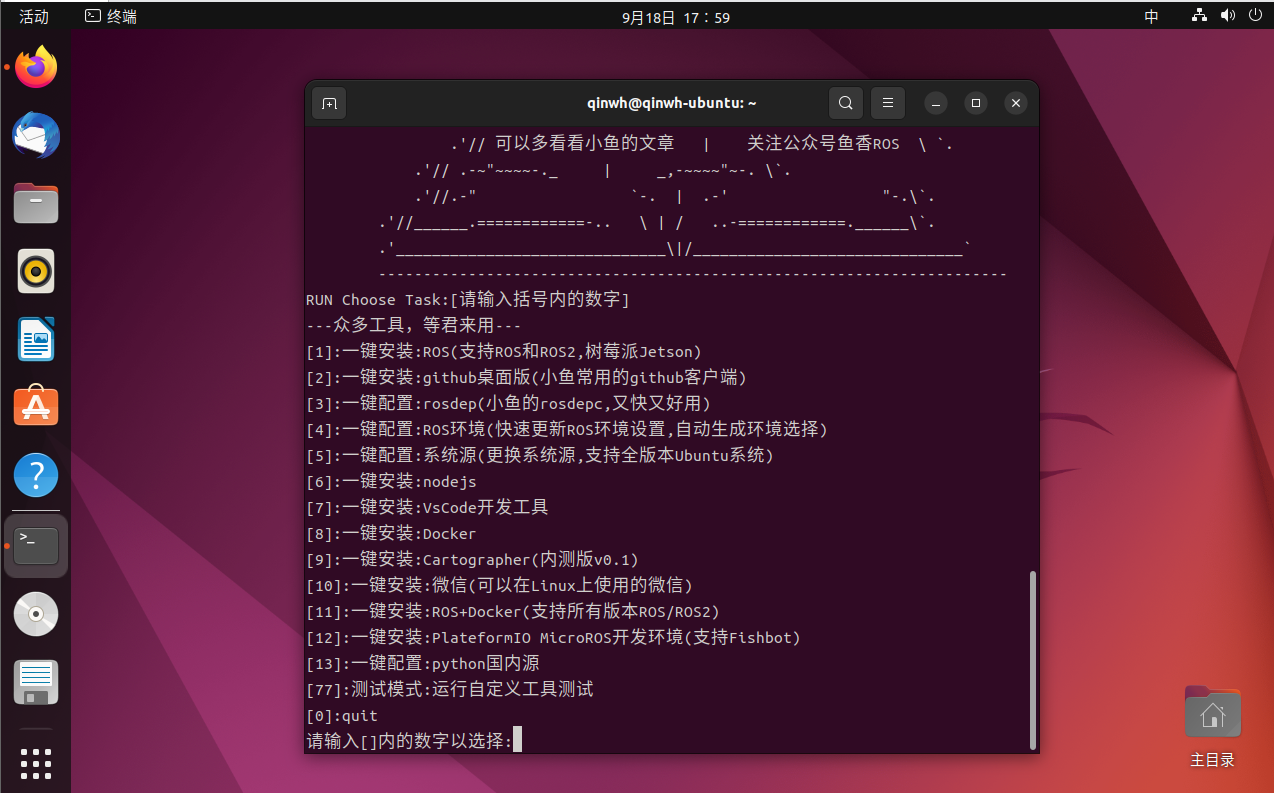
第一次安装选择1 更换系统源
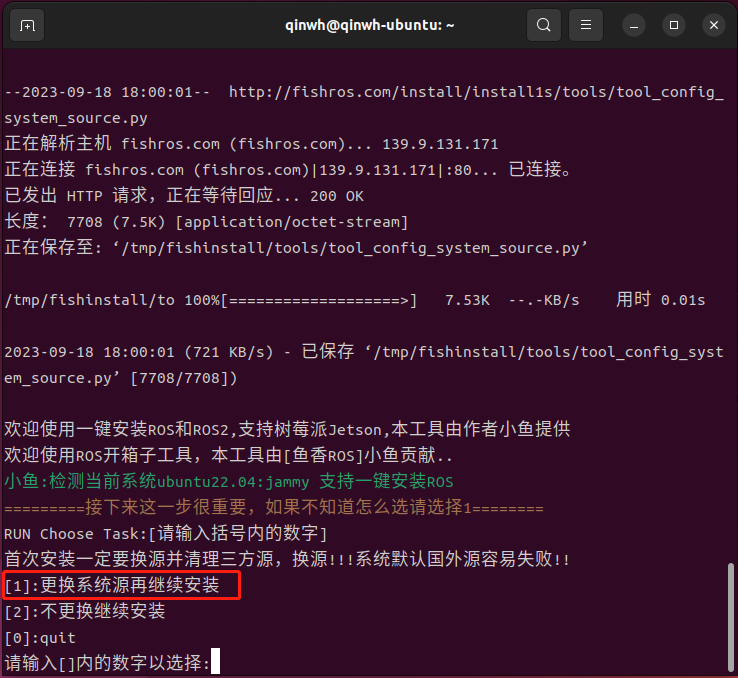
后续按提示操作即可,我选择安装的版本是humble桌面版,后续如果我们在开发板上安装的时候尽量选基础版,因为桌面版占性能比较大,而我们的开发板性能稍差。而且我在板子上装的也不是桌面版的linux。
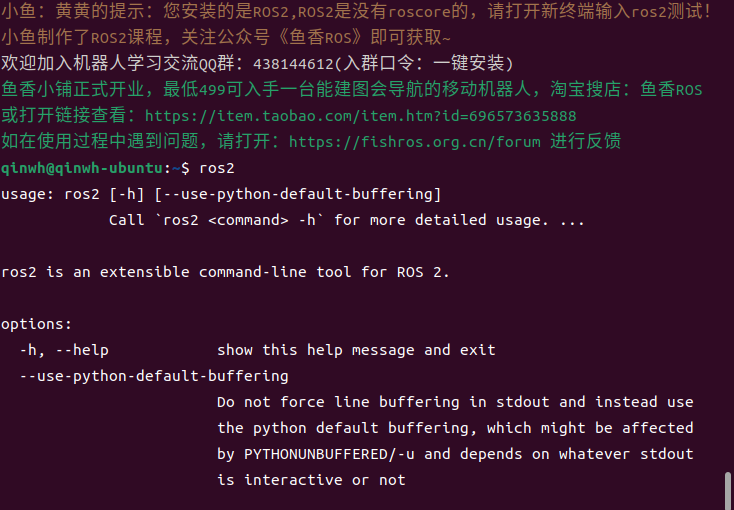
安装完成后如下图所示,我们可以输入ros2命令验证是否成功

输入ros2有以下提示说明已经安装成功,如果提示ros2不是命令行,就试试运行该命令:source /opt/ros/humble/setup.bash
安装rosdep
继续执行上面的一键安装命令wget http://fishros.com/install -O fishros && . fishros
输入数字3安装rosdep,该工具用于安装项目所需的依赖。
安装完成后输入命令rosdepc update进行更新
如下图表示更新完成
安装vscode
vscode是很强大的工具,我们可以用它在ubuntu上编辑我们的代码,该ide还支持很多插件!很强!
我们可以直接去官网下载安装包来安装,但是上面的一键安装脚本里也包含了vscode的安装,所以我们继续使用上面的脚本
继续执行上面的一键安装命令wget http://fishros.com/install -O fishros && . fishros
输入数字7安装vscode
结尾
到此,ROS2的环境就算是搭建好了,如果还需要装Git,一键安装脚本里也有了,按提示操作即可。有了别人的一键安装整合确实让我们少走了很多弯路,但福祸所依祸兮福所倚…
接下来我们就使用ROS2作为机器人开发的基础,进一步实现我们的目标



